Gostaria de sugerir uma nova funcionalidade para os veículos elétricos BYD, especialmente o Dolphin Mini e outros modelos urbanos, que poderia agregar eficiência e competitividade à linha de produtos.
Atualmente, o piloto automático convencional (Cruise Control) mantém a velocidade constante, ajustando automaticamente a potência conforme as variações do terreno. No entanto, em muitas situações de uso diário, especialmente para quem dirige com foco em eficiência energética (como motoristas profissionais e motoristas de aplicativo), isso resulta em consumo de energia elevado nas subidas e perdas de aproveitamento nas descidas.
Minha sugestão: incluir opcionalmente um Modo de Cruzeiro por Potência Constante, onde:
O veículo manteria a entrega de potência constante ao motor elétrico, permitindo que a velocidade varie naturalmente de acordo com o relevo e condições de rolamento.
Subidas fariam o carro reduzir velocidade suavemente, enquanto descidas permitiriam ganho natural de velocidade (limitado pelos parâmetros de segurança do sistema).
O condutor escolheria entre manter velocidade fixa (Cruise tradicional) ou potência fixa (novo modo), conforme a necessidade da viagem.
Em caso de aceleração excessiva em descidas, o sistema poderia aplicar regeneração automática para controle seguro.
Benefícios esperados:
Maior eficiência energética e autonomia.
Condução mais natural e confortável para perfis que priorizam economia.
Redução do esforço do motor em subidas intensas, aumentando a vida útil do sistema.
Diferencial competitivo para a BYD, especialmente entre motoristas de transporte urbano e de longa distância.
Estou à disposição para esclarecer melhor essa ideia, caso haja interesse.
Não sei se alguém que frequente esse fórum tem poder pra incluir/modificar alguma funcionalidade do carro…
Só pra constar, estamos em um fórum de proprietários, até onde sabemos, não temos pessoas envolvidas diretamente com o desenvolvimento dos carros aqui.
Obrigado pela sua explicação detalhada. Perguntarei à equipe de P&D na China se essa função pode ser melhorada, mas geralmente isso leva muito tempo. Além disso, também é preciso investigar se outros modelos concorrentes no Brasil possuem essa função.
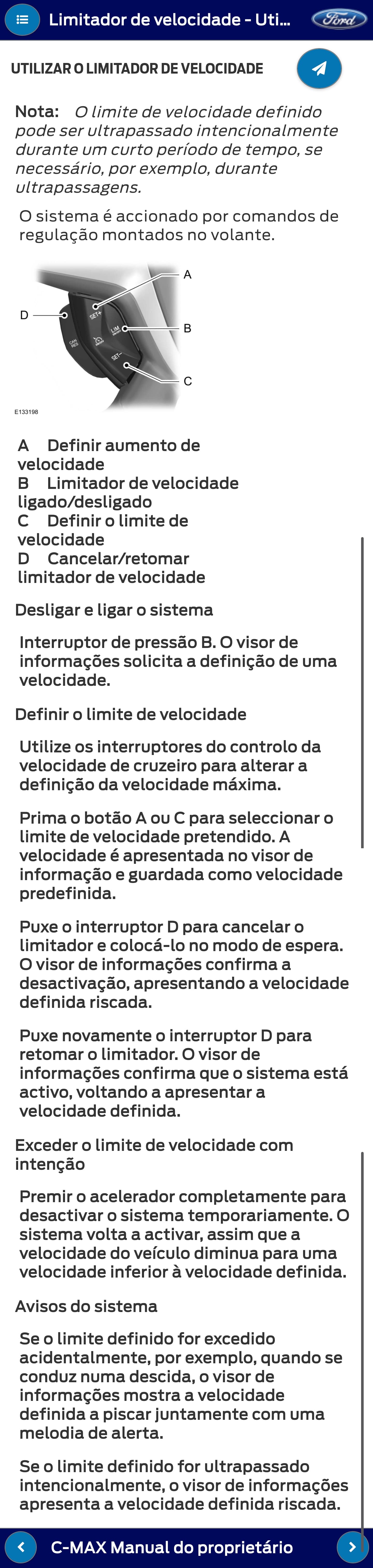
Aproveitando o tema, seria interessante também que tivesse uma opção de limitar a velocidade máxima. Eu tive um sandero que voce podia acionar o cruise (manter a velocidade) ou o limit (vc acelera e freia normalmente, mas o carro não ultrapassa aquele limite estabelecido).
Eu ando com frequência em vias expressas com muitos radares de 80 ou 90 km/h e não da pra manter o cruise direto, sempre é preciso frear um pouco devido ao transito e ele desarma. Estabelecendo um limite, podia andar despreocupado que nunca ultrapassava o limite de velocidade e não precisava me preocupar com multas.
Essa inteligência é o que falta no ACC em TODOS veículos, pois seria o melhor dos mundos que o piloto automático permitisse um limite de queda de velocidade para poupar energia/combustível… Quem sabe começaria a usar o ACC se tivesse esse recurso.
acredito que desta maneira seria uma coisa muito especifica somente para nós entusiastas. Derrepente uma solução interesante seria o Cruise Control responder conforme o modo de condução selecionado Eco, Normal ou Sport ficando mais suave nas acelerações no modo eco e deixando perder velocidade nas subidas
O ACC responde ao modo de condução, porém ele não deixa muita margem pra baixo. Exemplo, se colocar pra andar a 100km/h ele deixa cair até 97km/h antes de aumentar a potência, no sport ele já aumenta a potência quando cai pra 99km/h. No sport, em uma saída de pedágio, por exemplo, ele “soca o pé” ao subir o ajuste de 40km/h pra 90km/h, no eco vai bem suave.
Mas eu acho que você está se referindo ao controle de cruzeiro normal, não o adaptativo.
A título de curiosidade. Qual seria a margem ideal, nessa ideia? Digo, se estiver programado pra 100km/h e pegar um “baixadão”, pra quanto seria aceitável que ele baixe dos 100km/h durante a subida?
Poderia ser configurável… Os carros (principalmente os elétricos) já são movidos a software… Pq não explorar melhor os recursos de hardware que já tem usando o software?
Com controle de cruzeiro ativado? Nos carros que tive isso não acontecia não, exceto entre o carro reagir à queda da velocidade e conseguir reformar ela.
Não seguir a velocidade definida pelo usuário meio que foge do conceito de “controle de (velocidade) de cruzeiro”.
Por mais que eu entenda o caso de uso. Acho que é contraintuitivo. Cruise (cruzeiro) é relacionado à uma velocidade constante.
Definir com base na potência poderia ser tecnicamente pior até mesmo pra autonomia. Se definir o limite em 20kw, por exemplo, a depender do modelo a perda de velocidade pode se grande, na ordem de 30-40%. Aí imagina ficar a 60km/h numa subida onde o limite é 100km/h, vai acabar precisando ganhar velocidade, porém a subida é onde mais se gasta pra ganhar velocidade, então subir de 60km/h pra 80km/h pode custar muito mais do que foi “economizado”.
Do ponto de vista de autonomia, manter uma velocidade constante é melhor do que oscilar velocidade. Pra sair de 80km/h até 100km/h gasta-se muito mais do que pra andar a 100km/h. E vale lembrar que a relação potência x velocidade não é linear.
O que pode ser feito, e eu faço de vez em quando, é reduzir a velocidade limite em longas subidas, assim ele consome um pouco menos mas mantém uma velocidade segura.
Na minha visão, o limitador de velocidade faz muito mais sentido.
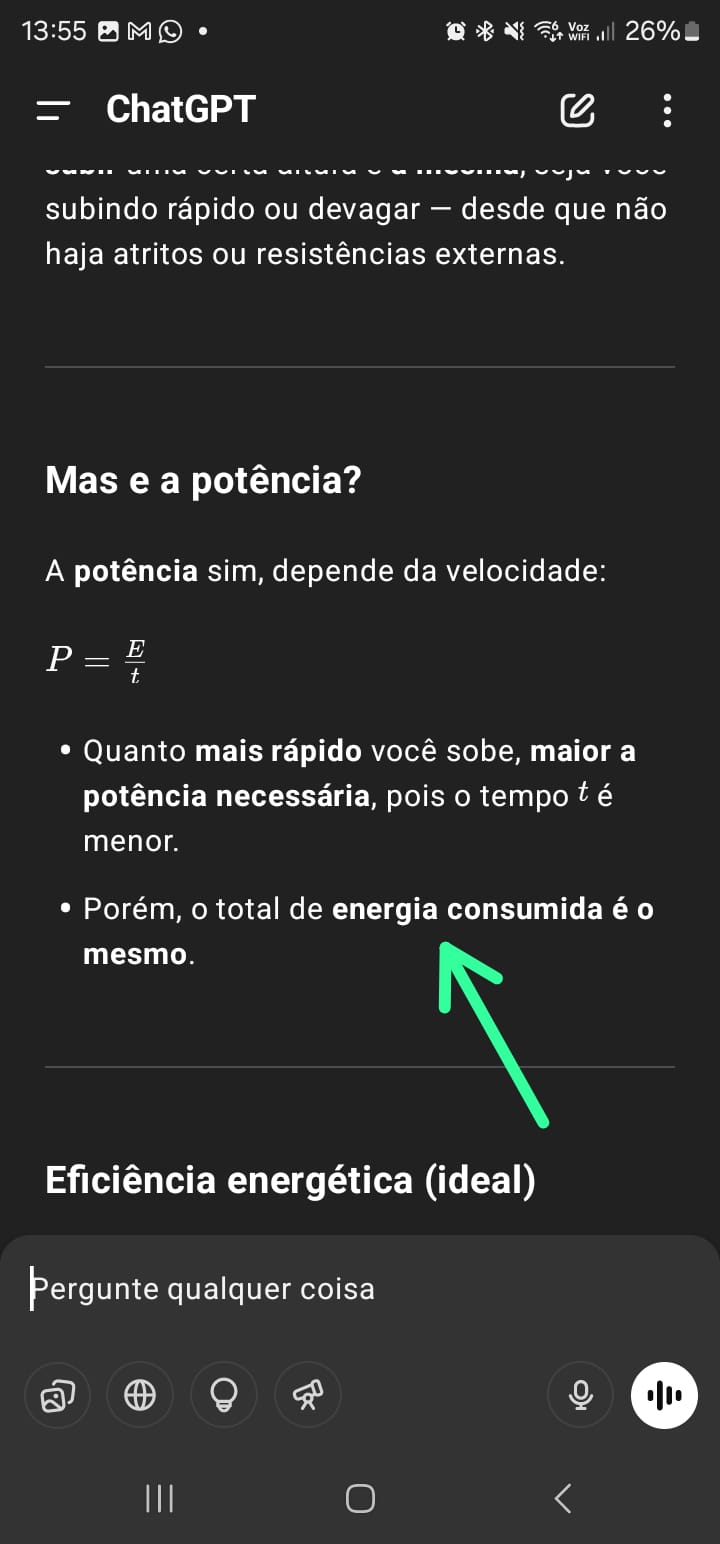
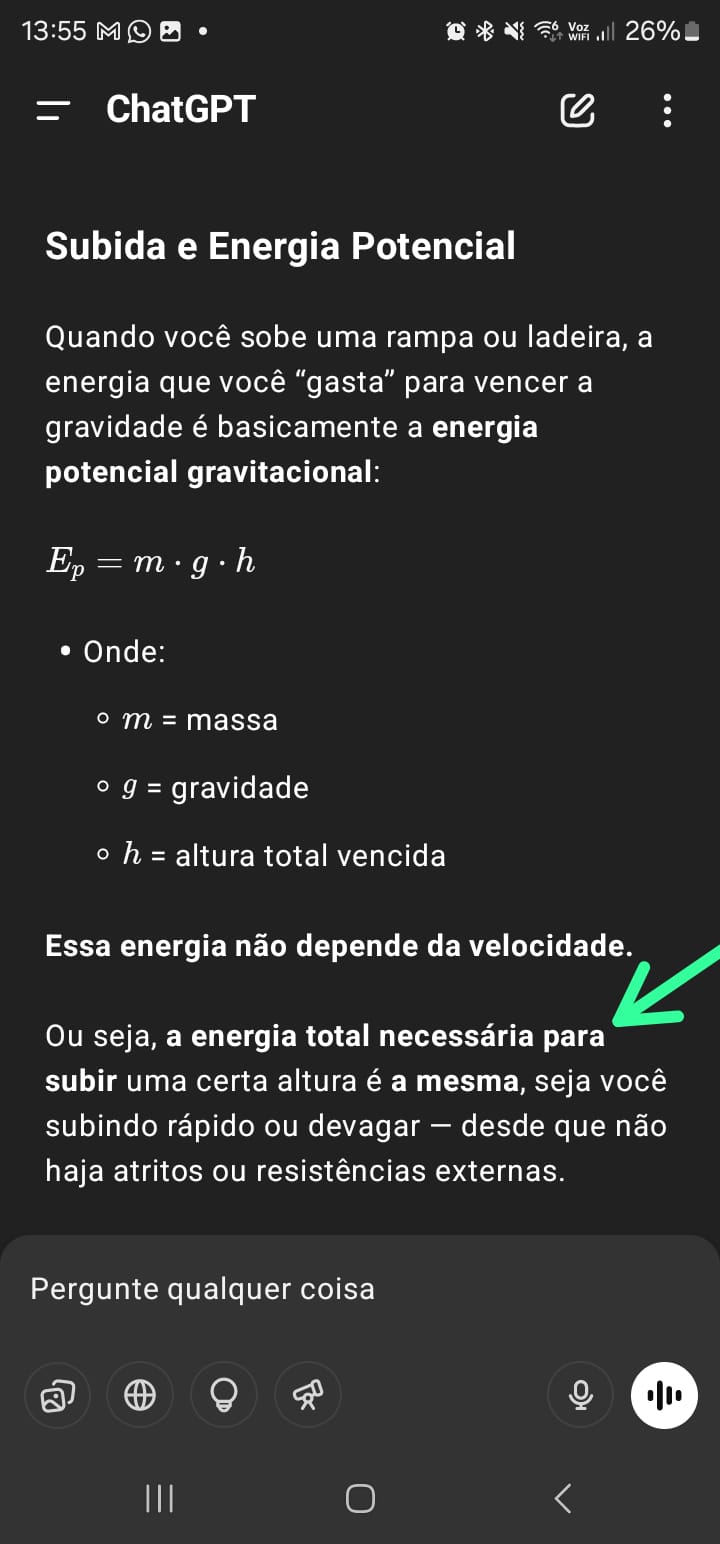
Do ponto de vista de funcionalidade é interessante. Mas do ponto de vista de economia, a velocidade de subida não influência no gasto energético, porque o “trabalho” que o carro esta realizando(subir uma colina por exemplo) não é influenciado pela velocidade(a subida não fica maior ou menor). Claro, desconsiderando resistência do ar e outras percas do sistema, que não era o ponto da discussão.